
伺服电机的普遍的问题和维修方法
伺服系统是机电产品中的重要环节,它能提供顶配水平的动态响应和扭矩密度,所以拖动系统的发展的新趋势是用交流伺服驱动取替传统的液压、直流、步进和AC变频调速驱动,以便使系统性能达到一个全新的水平,包括更短的周期、更高的生产率、更好的可靠性和更长的寿命。为实现伺服电机的更好性能,就必须对伺服电机的一些使用特点有所了解。

客户在一些机械上使用伺服电机时,经常会发生噪声过大,电机带动负载运转不稳定等现象,出现此问题时,许多使用者的第一反应就是伺服电机质量不好,因为有时换成步进电机或是变频电机来拖动负载,噪声和不稳定现象却反而小很多。表面上看,确实是伺服电机的原故,但我们仔细分析伺服电机的工作原理后,会发现这种结论是完全错误的。
交流伺服系统包括:伺服驱动、伺服电机和一个反馈传感器(一般伺服电机自带光学偏码器)。所有这些部件都在一个控制闭环系统中运行:驱动器从外部接收参数信息,然后将一定电流输送给电机,通过电机转换成扭矩带动负载,负载根据它自己的特性进行动作或加减速,传感器测量负载的位置,使驱动装置对设定信息值和实际位置值作比较,然后通过改变电机电流使实际位置值和设定信息值保持一致,当负载突然变化引起速度变化时,偏码器获知这种速度变化后会马上反应给伺服驱动器,驱动器又通过改变提供给伺服电机的电流值来满足负载的变化,并重新返回到设定的速度。交流伺服系统是一个响应非常高的全闭环系统,负载波动和速度较正之间的时间滞后响应是非常快的,此时,真正限制了系统响应效果的是机械连接装置的传递时间。
举一个简单例子:有一台机械,是用伺服电机通过V形带传动一个恒定速度、大惯性的负载。总系统需要获得恒定的速度和较快的响应特性,分析其动作过程。
当驱动器将电流送到电机时,电机立即产生扭矩;一开始,由于V形带会有弹性,负载不会加速到像电机那样快;伺服电机会比负载提前到达设定的速度,此时装在电机上的偏码器会削弱电流,继而削弱扭矩;随着V型带张力的持续不断的增加会使电机速度变慢,此时驱动器又会去增加电流,周而复始。
在此例中,系统是振荡的,电机扭矩是波动的,负载速度也随之波动。其结果当然会是噪音、磨损、不稳定了。不过,这都不是由伺服电机引起的,这种噪声和不稳定性,是来源于物理运动装置,是由于伺服系统反应速度(高)与机械传递或者反应时间(较长)不相匹配而引起的,即伺服电机响应快于系统调整新的扭矩所需的时间。
(1)增加机械刚性和降低系统的惯性,减少物理运动部位的响应时间,如把V形带更换成直接丝杆传动或用齿轮箱代替V型带;
(2)降低伺服系统的响应速度,减少伺服系统的控制带宽,如降低伺服系统的增益参数值。
当然,以上只是噪声、不稳定的原因之一,针对不同的原因,会有不同的处理方法,如由机械共振引起的噪声,在伺服方面可采取共振抑制,低通滤波等方法,总之,噪声和不稳定的原因,大多数都不会是由于伺服电机本身所造成。
1、在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量发展要求来具体选择具有合适惯量大小的电机。
2、在调试时(手动模式下),正确设定惯量比参数是充分的发挥机械及伺服系统最佳效能的前题,此点在要求高速高精度的系统上表现由为突出(台达伺服惯量比参数为1-37,JL/JM)。这样,就有了惯量匹配的问题!
角加速度θ影响系统的动态特性,θ越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。如果θ变化,则系统反应将忽快忽慢,影响加工精度。由于马达选定后最大输出T值不变,如果希望θ的变化小,则J应该尽可能小。
2、进给轴的总惯量“J=伺服电机的旋转惯性动量JM+电机轴换算的负载惯性动量JL
负载惯量JL由(以工具机为例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到马达轴上的惯量组成。JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工件等负载改变而变化。如果希望J变化率小些,则最好使JL所占比例小些。这就是通俗意义上的“惯量匹配”。
传动惯量对伺服系统的精度,稳定性,动态响应都有影响,惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。不同的机构,对惯量匹配原则有不同的选择,且有不同的作用表现。例如,CNC中心机通过伺服电机作高速切削时,当负载惯量增加时,会发生:
②当JL=3×JM,则马达的可控性会些微降低,但对平常的金属切削不会有影响(高速曲线切削一般建议JL≦JM);
不同的机构动作及加工质量发展要求对JL与JM大小关系有不同的要求,惯性匹配的确定应该要依据机械的工艺特点及加工质量发展要求来确定。
伺服电机因为长期连续不断使用或者使用者操作不当,会经常发生电机故障,维修又相对复杂的。小编收集了伺服电机发生的13种常见的故障问题的维修方法,供大家学习借鉴。
伺服电机是一个典型闭环反馈系统,减速齿轮组由电机驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动电机正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,进而达到使伺服电机精确定位与定速的目的。
1、只是有2~4个极小火花.这时若换向器表面是平整的.大多数情况可不必修理;
3、有4个以上的极小火花,而且有1~3个大火花,则不必拆卸电枢,只需用砂纸磨碳刷换向器;
4、假如慢慢的出现4个以上的大火花,则需要用砂纸磨换向器,而且必须把碳刷与电枢拆卸下来.换碳刷磨碳刷。
1、换向器表面明显地不平整(用手能触觉)或电机运转时火花如第四种情况。此时需拆卸电枢,用精密机床加工转换器;
2、基本平整,只是有极小的伤痕或火花,如第二种情况l口1以用水砂纸手工研磨在不拆卸电枢的情况下研磨。研磨的顺序是:先按换向器的外圆弧度,加工一个木制的工具,将几种不同粗细的水砂纸剪成如换向器一样宽的长条,取下碳刷(请注意在取下的碳刷的柄上与碳刷槽上做记号,确保安装时不致左右换错)用裹好砂纸的木制工具贴实换向器,用另一只手按电机旋转方向,轻轻转动轴换向器研磨。伺服电机维修使用砂纸粗细的顺序先粗后细当一张砂纸瞎得不能用后,再换另较细的砂纸,直到用完最细的水砂纸(或金相砂纸)。
带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:
1)用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
4)一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;
5)来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
绝对式编码器的相位对齐对于单圈和多圈而言,差别不大,其实都是在一圈内对齐编码器的检测相位与电机电角度的相位。目前很实用的方法是利用编码器内部的EEPROM,存储编码器随机安装在电机轴上后实测的相位,具体方法如下:
1)将编码器随机安装在电机上,即固结编码器转轴与电机轴,以及编码器外壳与电机外壳;
2)用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;
3)用伺服驱动器读取绝对编码器的单圈位置值,并存入编码器内部记录电机电角度初始相位的EEPROM中;
在进给时出现窜动现象,测速信号不稳定,如编码器有裂纹;接线端子接触不良,如螺钉松动等;当窜动发生在由正方向运动与反方向运动的换向瞬间时,一般是由于进给传动链的反向问隙或伺服驱动增益过大所致。
大多发生在起动加速段或低速进给时,一般是由于进给传动链的润滑状态不良,伺服系统增益低及外加负载过大等因素所致。尤其要注意的是,伺服电动机和滚珠丝杠联接用的联轴器,由于连接松动或联轴器本身的缺陷,如裂纹等,造成滚珠丝杠与伺服电动机的转动不同步,从而使进给运动忽快忽慢。
机床高速运行时,可能会产生振动,这时就会产生过流报警。机床振动问题一般属于速度问题,所以应寻找速度环问题。
伺服电机从额定堵转转矩到高速运转时,发现转矩会突然降低,这时因为电动机绕组的散热损坏和机械部分发热引起的。高速时,电动机温升变大,因此,正确使用伺服电机前一定要对电机的负载进行验算。
当伺服轴运动超过位置允差范围时(KNDSD100出厂标准设置PA17:400,位置超差检验测试范围),伺服驱动器就会出现“4”号位置超差报警。根本原因有:系统设定的允差范围小;伺服系统增益设置不当;位置检测装置有污染;进给传动链累计误差过大等。
数控系统到伺服驱动器除了联结脉冲+方向信号外,还有使能控制信号,一般为DC+24V继电器线圈电压。伺服电动机不转,常用诊断方法有:检查数控系统是否有脉冲信号输出;检查使能信号是否接通;通过液晶屏观测系统输入/出状态是不是满足进给轴的起动条件;对带电磁制动器的伺服电动机确认制动已经打开;驱动器有故障;伺服电动机有故障;伺服电动机和滚珠丝杠联结联轴节失效或键脱开等。
在现场的实际应用中,我们会在安装上遇到很多问题,包括机械方面和电气方面的,如果不注意或是做的不规范,都会影响编码器的正常使用和寿命,以下的指导说明在安装上做了详细的说明,更能有助于我们的应用体验。
每种电气接口有各自的特点,也有不同的波特率和传输距离,能够准确的通过现场具体的应用环境来选择,实际传输距离与传输速率、编码器及通信线缆的安装干扰环境、接地、线缆选材等有很大关系。

编码器的导线要根据参数表的电气说明来连接,不使用的导线应单独绝缘包扎或增加绝缘套,防止因与其他信号或电源线短接而损坏编码器。
编码器电气接线必须在完全断电的情况下进行,带电拔插连接头或电缆,极易损坏编码器。
供电电源电压必须稳定而波动不大,不要与高干扰元件(如变频器、电磁阀、接触器)共用电源,也能够正常的使用滤波电源。
(2)加工设施上选择耐油污、冷却液、切削碎片的电缆,避免从电缆接插线和编码器外壳渗透进入;
编码器通讯电缆在布线.通讯电缆必须远离电机、变压器、变频器等严重磁场干扰设备;
2.通讯电缆必须与电源电缆、大功率电缆及高噪电缆分开铺设,最好使用屏蔽良好的金属电缆管套;
5.电缆要合理布线,避免预留电缆过长,造成线.为避免耦合干扰,应最好能够降低信号电缆与功率电缆平行走线.电缆应尽量安排在距离金属部件近的位置,例如控制柜面板、横梁和金属导轨等;
编码器在现场安装时,不能与变频器、变压器、电磁阀等高干扰源设备装在一起,保持10cm的间距,或是加装金属隔板来隔离。

与编码器通讯的模块,在电气柜内安装时,不能与变频器、接触器等高干扰源元件或是频繁开断的开关元件安装在一起,保持3cm的间距,或是加装金属隔板来隔离。
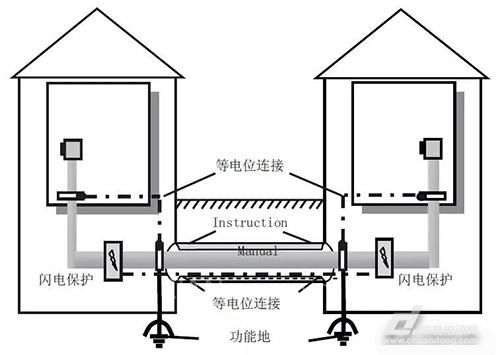
电缆的屏蔽层应在信号接收端作单端接地,防止两个接地点之间的漏电流损坏电缆;
如果电缆的屏蔽线不能够达到很好的接地保护,需要连接一根单独的接地线来做屏蔽;
接地长距离连接时,需要在产品外壳和接地点之间添加黄绿线,作为等电势补偿线;
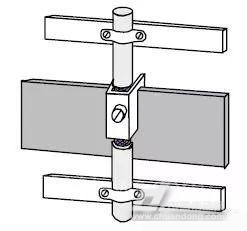
屏蔽电缆必须在两端连接电气元件的金属外壳(编码器或者电柜),并确保正确连接(大面积接触金属表面);
以上的安装指导说明供各位在现场安装和维护工作中作为参考,希望能有助于大家提升工作效率,尽早地预防故障的发生,保障编码器的正常运行。
关键字:引用地址:伺服电机的普遍的问题和维修方法上一篇:西门子PLC之S7-1500冗余配置实践
本文针对手机电磁兼容测试中常常会出现的问题,包括静电放电抗扰度试验、电快速瞬变脉冲群抗扰度试验、辐射骚扰及传导骚扰性能测试中经常发现的问题进行了分析,并提出了相应的改善手机电磁兼容性能的建议。 1、静电放电抗扰度试验 1.1静电放电抗扰度试验普遍的问题 静电放电抗扰度测试中出现的问题主要体现在以下几个方面。 (1)手机通线)静电放电导致手机部分功能失效,但静电放电过程结束后或者重新再启动手机之后失效的功能能恢复。这些现象可能为:屏幕显示异常,如屏幕显示呈白色、出现条纹、显示出现乱码、显示模糊等等;通话效果出现问题,如啸叫声或者声音消失;按键功能或者触摸屏功能丧失;软件出现误告警,如在并没再次出现插拔充电器的情况
1)TMS320C32的存储器配置: TMS320C32的程序存储器可以配置为16位或32位;数据存储器可以配置为8位、16位或32位。 2)TMS320VC33的PLL控制: TMS320VC33的PLL控制端只能接1.8V,不能接3.3V或5V。 如何调试多片DSP? 对于有MPSD仿线),不能用一套仿真器同时调试,每次只能调试其中的一个DSP; 对于有JTAG仿真口的DSP,可以将JTAG串接在一起,用一套仿真器同时调试多个DSP,每个DSP可以用不同的名字,在不同的窗口中调试。 注意:如果在JTAG和DSP间加入驱动,一定要用快速的门电路,不可以使用如LS的慢速门电路。
1、怎样将 FreeRTOS 移植到不同的Cortex-M 内核? 答:若需将 FreeRTOS 移植到正确的Cortex-M 产品,您必须从正确的目录导入 “port.c”文件。例如,若微控制器是带有IAR 工具的 Cortex-M0 内核,则您必须从“FreeRTOS\Source\portable\IAR\ARM_CM0” 获取 port.c。 2、FreeRTOS 使用需要ROM/RAM? 答:这取决于您的编译器、代码架构,以及RTOS 内核配置。一般来说, RTOS 内核本身需要大约 5到 10 K 字节 ROM 空间。 如果创建的线程或队列数增加,RAM 使用量就会上升。 3、怎样设置 CPU 时钟? 答:CPU 时钟
matlab安装、运行与别的问题集锦 Q1:matlab有没有监视内存的方法? A: 用函数whos。 Q2:怎么样才能解决matlab7.0命令窗口跳出一大堆java错误... A: 换matlab 7的sp2。 Q3:自从安装matlab,一开机就在进程里有matlab。 能不能开机的时候进程就不运行matlab? A: 开始-- 控制面板-- 管理工具-- 服务 把MATLAB Server的属性改成“手动”就行了。 Q4:退出matlab7程序运行的快捷键。 A: ctrl+q Q5:matlab7远程控制是否有限制? A: 不能远程控制,不过你可以先在你的remote机器上打开,然后就可以用了。
随着全数字式交流伺服系统的出现,交流伺服电机也慢慢变得多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。 步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也慢慢的变多地应用于数字控制管理系统中。为了适应数字控制的发展的新趋势,运动控制管理系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。现就二者的使用性能作一比较。 一、控制精度不同 两
在非标自动化设计中,往往离不开伺服电机。电机的种类众多,然而成了许多设计工程师的难题,一直被困扰着。接下来教你怎么选择伺服电机,告诉你伺服电机到底怎么选型。 伺服(Servo),指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度、加速度和力矩。 伺服控制管理系统(servo control system)一-是所有机电一-体化设备的核心,它的基本设计要求是输出量能迅速而准确地响应输入指令的变化,如机械手控制管理系统的目标是使机械手能够按照指定的轨迹进行运动。象这种输出量以一-定准确度随时跟踪输入量(指定目标)变化的控制管理系统称为伺服控制管理系统,因此,伺服系统也称为随动系统或自动跟踪系统。它是以机械量如位移、速度、加速度、力、力
的选型原则 /
问题一: 在电路设计时为什么不能超电压或超电流使用白光 LED ?一般最常用的5mm白光LED,其正常工作电压多在3.0-3.5V范围以内,正常工作电流为20mA。但很多人误以为超电压或超电流使用白光LED会更亮,而实际测试结果是15mA以后光通量增长很厉害,20mA以后就没有见长,增大到30mA,比20mA只多了5%,但LED却有明显的发热。还有寿命的试验:20mA工作了一个月,衰减只有5%,现在还有95%的光通量,30mA的工作到19天的时候,光通量就只有50%了。能这样认为,一只在正常条件下可工作10万小时的白光LED,在大电流下使用,寿命只有600小时!LED在一般说明中,都是能够正常的使用50,000小时之后,还有一些生产
一、 引言 随着包装行业的迅猛发展,波纹纸板生产线的生产效率逐年提高,大多数表现在波纹纸板生产线后端的电脑横切机速度的大幅提高。电脑横切机的控制部分需满足精准的裁切长度的同时还要满足很高的裁切速度。其难点在于纸板处于高速运动状态,切刀的动态控制需极高的运算速度和极高的跟踪性能。变频器的控制无法达到高的裁切速度(40M/min—80M/min),裁切误差也随速度的提高而慢慢的变大,PLC对脉冲的反馈速度也不足以满足裁切精度的要求。运动控制卡加进口伺服系统的控制方式是可完全满足精度和速度的双向要求,速度可达到200M/min—300M/min,还是有价格昂贵,供货时间长等不足之处。这篇文章着重介绍的将运动控制卡集成在伺服驱动器之内的BW
基础训练丛书:教你认识汽车电子控制器
及其控制 (寇宝泉,程树康编著)
直播回放: 国产芯 - 先楫800MHz RISC-V MCU高能秀,岂止控4只伺服电机
最后1天报名【送开发板,送好礼】STM32直播:多款新品发布、成功案例、全新解决方案
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!第三期考题上线,跟帖赢好礼~
随着我们正常的生活水平的提高,音箱的用途愈来愈普遍,在靓丽的长者达人广场舞群体身旁,在户外的商业活动场合,在各种专业的弹奏演唱表演现场等 ...
目前市面上的咖啡机款式众多,功能各异,无论是家用还是商用不能离开家电的“智慧大脑”微控制器(MCU);咖啡机的冲泡系统,精准稳定 ...
IU5365具有NTC及电池过放电电压保护功能,3A异步降压型铅酸电池充电管理IC
IU5365E是一款异步降压型铅酸电池充电管理IC。集成功率MOS,具有最大3A的充电电流能力,充电电流能够最终靠外部电阻灵活可调。IU5365E通过设 ...
国芯思辰 高灵敏度全极霍尔AH462在消毒柜中的应用,兼容SS3413
消毒柜在家居生活中的重要性是非常大的,能保证餐具的干净,用起来更安全,方便家居生活。霍尔元件在消毒柜的应用,主要是安全保护的作 ...
MediaTek Genio 130/130A(MT7931/MT7933) 智能家居之Matter应用方案
Matter作为目前火热的智能家居标准,由Connectivity Standards Alliance (CSA)推广,致力于夸平台、跨生态系,解决不同的智慧家电、装置 ...
基于高通 QCC5181 aptX adptivite 24 bit-96KHz/Lossless蓝牙扩大机方案
IU5207三串锂电池快充芯片,集成30伏OVP支持20瓦快充,最大1.3A充电电流

嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云:
相关产品
-
最新资讯_智能设备_运动_汽车_智慧出行频道_天极网
-
评测_天极网_专业IT门户
-
工银双债增强债券
-
皇冠新材实控之一澳籍营收净利增幅均下滑分红超补流
-
年报]怡合达(301029):2025年年度报告摘要
-
凯特精机闪烁 CCMT2026爆款产品引爆现场!
-
Sohu汽车频道
-
张雪机车发布召回通告;阿里等洽谈投资DeepSeek;特斯拉中国车机将接入豆包;杜蕾斯供应商宣布涨价

